Ch8-2 深度测试和深度可视化
深度值是表示片段远近程度的数值(如今才提是不是太晚了点?)。
深度测试(depth test),指通过比较片段的深度值,根据遮挡关系,确定是否要保留片段的一种图形管线功能。
本节分成两件事情:
1.进行3D渲染,绘制多个远近不同的立方体,使用深度测试呈现出正确的遮挡关系。示例代码:Ch8-2.hpp
2.将深度显示到屏幕,以更直观地理解一些深度相关的功能。
投影变换
在进入正题之前,首先要非常简要地讲述下渲染3D物体相关的基本知识。
3D渲染往往会用到MVP矩阵,MVP分别指模型(model)、观察(view)、投影(projection)三个矩阵。
-
模型矩阵:模型矩阵是描述物体在场景中的位置、旋转、放缩的矩阵。
-
观察矩阵:观察矩阵将用场景中物体的坐标,从世界坐标系变换到以相机/观察者的位置为原点的参考系(称相机坐标系,或观察坐标系)。
-
投影矩阵:投影矩阵将相对于观察者的坐标变换到NDC坐标(2D/正交投影),或离NDC坐标只有一步之遥的剪裁空间坐标(透视投影)。
为简化叙事,这一节不会使用模型矩阵和观察矩阵。我预先准备了经透视投影变换后,能出现在屏幕中的3D模型顶点数据。
GLM中的透视投影矩阵
这节我们会使用透视投影矩阵,GLM中的生成透视投影矩阵的函数可以分为两类:名字中带perspective的和frustum(...)。
首先注意,下文的infinitePerspective(...)函数从GLM1.0.0(24年1月24日release)开始,才有对应Vulkan的NDC深度范围的版本。
通常情况下,你只要会用以下这两个函数即可:
template<template T> mat4 infinitePerspective(T fovy, T aspect, T zNear); template<template T> mat4 perspective( T fovy, //垂直视场角,弧度制 T aspect, //宽高比 T zNear, //近平面的位置 T zFar //远平面的位置 );
-
视场角即从观察者出发,上下左右的观察范围边界之间的夹角。 视场角越大,近大远小的效果越显著。
3D渲染中,需要指定相机坐标系中的近平面和远平面,两平面之间即是能被渲染的范围。
远平面可以是无穷远,但你在perspective(...)中指定远平面为inf的话,运算会出错,infinitePerspective(...)是专用于指定无穷远的远平面的函数。
template<template T> mat4 perspectiveFov( T fov, //垂直视场角,弧度制 T width, //宽 T height, //高 T near, //近平面的位置 T far //远平面的位置 );
-
虽然fov没有后缀y,但确实是垂直视场角,不是水平视场角。
-
width和height不用是任何具体对象的宽和高,只要成一定比例,算出的矩阵就是一样的。
perspectiveFov(...)和perspective(...)虽然变量名和底层实现不同(估计不是同一个人写的),
perspectiveFov(fov, w, h, n, f)几乎等价于perspective(fov, w / h, n, f),两者的运算逻辑本质上是相同的,运算结果的差值在小数点后7位数。
template<template T> mat4 tweakedInfinitePerspective(T fov, T aspect, T zNear, T ep);
tweakedInfinitePerspective(...)是给OpenGL用的,在Vulkan里用不着。
Vulkan和OpenGL中,默认的视口深度范围是[0, 1],亦是不开启扩展的情况下所容许的深度界限。
上述函数处理这种情况:GL中,NDC深度范围为[-1, 1],映射到视口深度范围[0, 1]时可能发生精度损失,使得视口深度本该接近或等于的1的片段,视口深度略大于1,导致片段被丢弃。
Vulkan中NDC深度的范围本就是[0, 1],因此不需要这个函数。
template<template T> mat4 frustum(T left, T right, T bottom, T top, T nearVal, T farVal);
frustum(...)让你填写上下左右的边界,看着似乎比要你填视场角的情况直观。
然而,当你傻乎乎地往参数里填入交换链图像大小的一半之后,程序一跑可能会发觉什么都没有,或者物体小得惊人(除非你的顶点坐标都大得惊人)。总之参数不易指定。
该函数相比perspective(...)的优势在于,后者生成的矩阵只会把相机参考系下的原点映射到视口中心,而通过向frustum(...)传入不对称的left和right(或bottom和top),就能把相机参考系的原点映射到偏离视口中心的位置(大概写VR程序用得到)。
有关投影变换的数学
Ch4-1 着色器模组中简单地讲了相机参考系坐标到NDC坐标的转换流程,这里来具体说一下投影矩阵底层的数学运算(你可以跳过不读这部分)。
投影矩阵本质上只是将4个一次函数写成了矩阵的形式,因此完全可以在初中数学的范畴内进行解释:
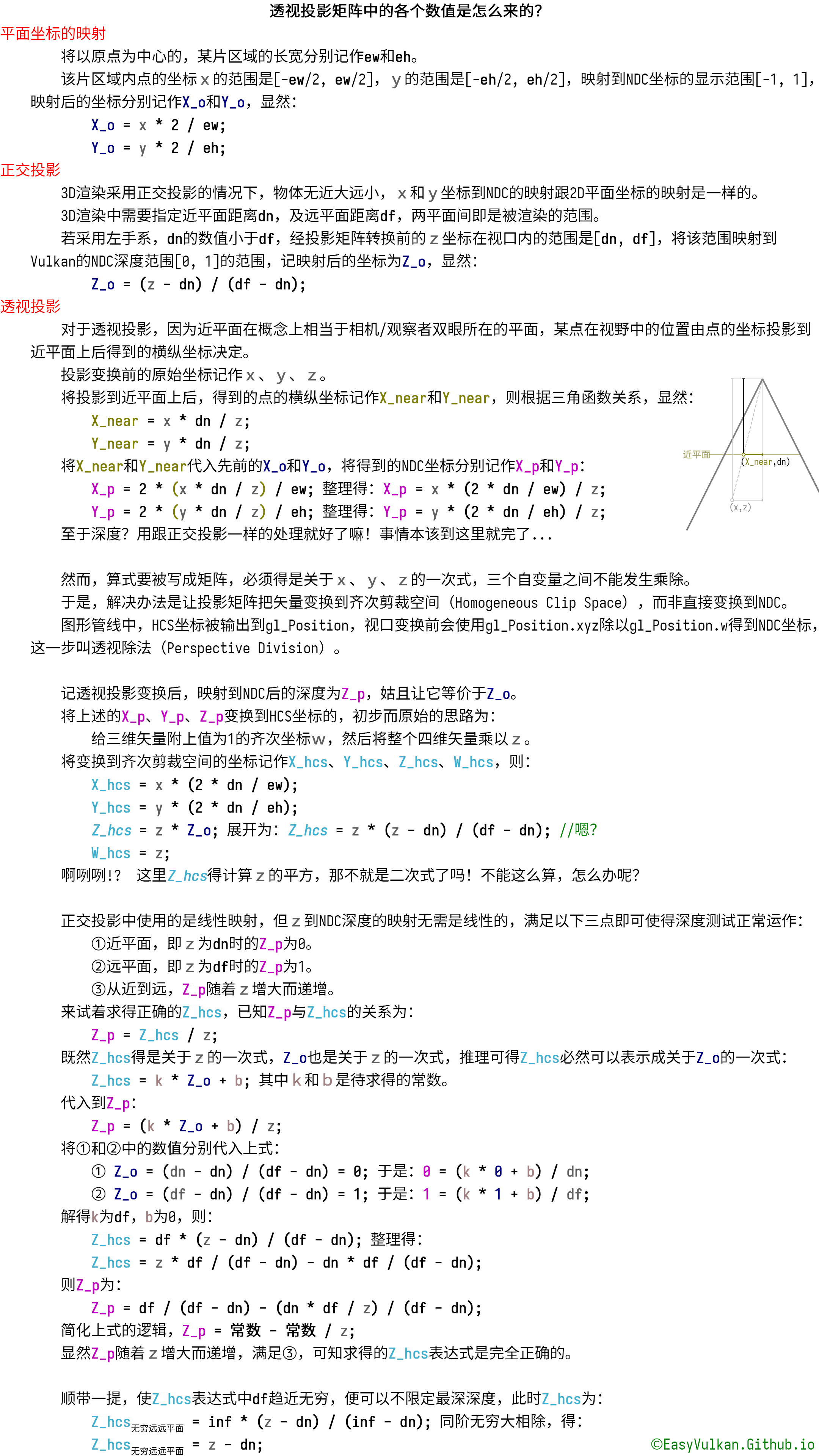
-
上图中的语境是左手系和NDC深度[0,1],GLM中与上图推导结果对应的函数为perspectiveLH_ZO(...)和infinitePerspectiveLH_ZO(...)。
绘制多个立方体的流程
在你已经写过了Ch7代码的基础上,进行3D渲染,绘制多个立方体的步骤如下:
1.创建深度附件、渲染通道和帧缓冲
2.创建顶点和索引缓冲区
3.书写着色器并创建管线
4.生成投影矩阵
5.绑定管线和各种缓冲区,更新常量,绘制
创建渲染通道和帧缓冲
在前一节里已经将深度模板附件封装为了depthStencilAttachment类型。于是向EasyVulkan.hpp,easyVulkan命名空间中,定义一个vector用来存放与交换链图像相应数量的深度模板附件,及用来创建深度模板附件、渲染通道、帧缓冲的函数CreateRpwf_Canvas(...):
std::vector<depthStencilAttachment> dsas_screenWithDS; const auto& CreateRpwf_Canvas(VkFormat depthStencilFormat = VK_FORMAT_D24_UNORM_S8_UINT) { static renderPassWithFramebuffer rpwf; static VkFormat _depthStencilFormat = depthStencilFormat; //因为一会儿需要用lambda定义重建交换链时的回调函数,把格式存到静态变量 /*待后续填充*/ return rpwf; }
-
在向此函数传入参数前,应调用depthStencilAttachment::FormatAvailability(...)验证向此函数提供的格式是否收支持。
开始创建渲染通道,首先书写子通道描述:
VkAttachmentDescription attachmentDescriptions[2] = { { //颜色附件 .format = graphicsBase::Base().SwapchainCreateInfo().imageFormat, .samples = VK_SAMPLE_COUNT_1_BIT, .loadOp = VK_ATTACHMENT_LOAD_OP_CLEAR, .storeOp = VK_ATTACHMENT_STORE_OP_STORE, .stencilLoadOp = VK_ATTACHMENT_LOAD_OP_DONT_CARE, .stencilStoreOp = VK_ATTACHMENT_STORE_OP_DONT_CARE, .finalLayout = VK_IMAGE_LAYOUT_PRESENT_SRC_KHR }, { //深度模板附件 .format = _depthStencilFormat, .samples = VK_SAMPLE_COUNT_1_BIT, .loadOp = _depthStencilFormat != VK_FORMAT_S8_UINT ? VK_ATTACHMENT_LOAD_OP_CLEAR : VK_ATTACHMENT_LOAD_OP_DONT_CARE, .storeOp = VK_ATTACHMENT_STORE_OP_DONT_CARE, .stencilLoadOp = _depthStencilFormat >= VK_FORMAT_S8_UINT ? VK_ATTACHMENT_LOAD_OP_CLEAR : VK_ATTACHMENT_LOAD_OP_DONT_CARE, .stencilStoreOp = VK_ATTACHMENT_STORE_OP_DONT_CARE, .finalLayout = VK_IMAGE_LAYOUT_DEPTH_STENCIL_ATTACHMENT_OPTIMAL } }; VkAttachmentReference attachmentReferences[2] = { { 0, VK_IMAGE_LAYOUT_COLOR_ATTACHMENT_OPTIMAL }, { 1, VK_IMAGE_LAYOUT_DEPTH_STENCIL_ATTACHMENT_OPTIMAL } }; VkSubpassDescription subpassDescription = { .pipelineBindPoint = VK_PIPELINE_BIND_POINT_GRAPHICS, .colorAttachmentCount = 1, .pColorAttachments = attachmentReferences, .pDepthStencilAttachment = attachmentReferences + 1 };
-
由于我们这次只有一个渲染通道,到循环中再次在该通道中绘制前不会再有深度或模板测试,因此渲染通道结束时无需保留深度和模板值,深度模板附件的storeOp和stencilStoreOp为VK_ATTACHMENT_STORE_OP_DONT_CARE。
-
这里根据格式是否有深度/模板值的分量,来确定深度模板附件的loadOp和stencilLoadOp是否为清空(虽然本节中不会使用模板测试)。
而即便使用的是仅深度或仅模板的格式,只要没开启separateDepthStencilLayouts硬件特性,深度模板附件在渲染通道中的内存布局就只能是VK_IMAGE_LAYOUT_DEPTH_STENCIL_ATTACHMENT_OPTIMAL。
填写子通道依赖,创建渲染通道:
VkSubpassDependency subpassDependency = { .srcSubpass = VK_SUBPASS_EXTERNAL, .dstSubpass = 0, .srcStageMask = VK_PIPELINE_STAGE_COLOR_ATTACHMENT_OUTPUT_BIT, .dstStageMask = VK_PIPELINE_STAGE_EARLY_FRAGMENT_TESTS_BIT, .srcAccessMask = 0, .dstAccessMask = VK_ACCESS_DEPTH_STENCIL_ATTACHMENT_WRITE_BIT, .dependencyFlags = VK_DEPENDENCY_BY_REGION_BIT }; VkRenderPassCreateInfo renderPassCreateInfo = { .attachmentCount = 2, .pAttachments = attachmentDescriptions, .subpassCount = 1, .pSubpasses = &subpassDescription, .dependencyCount = 1, .pDependencies = &subpassDependency }; rpwf.renderPass.Create(renderPassCreateInfo);
-
对深度模板附件的清空操作发生在早期片段测试(early fragment test)阶段,最迟可以在该阶段进行内存布局转换,因该阶段早于颜色附件输出阶段,dstStageMask填写为对应该阶段的bit。清空深度模板附件对应的操作类型是VK_ACCESS_DEPTH_STENCIL_ATTACHMENT_WRITE_BIT。
惯例,把创建和销毁帧缓冲的部分放入lambda:
auto CreateFramebuffers = [] { dsas_screenWithDS.resize(graphicsBase::Base().SwapchainImageCount()); rpwf.framebuffers.resize(graphicsBase::Base().SwapchainImageCount()); /*待后续填充*/; }; auto DestroyFramebuffers = [] { dsas_screenWithDS.clear(); rpwf.framebuffers.clear(); }; CreateFramebuffers(); ExecuteOnce(rpwf); //防止需重建逻辑设备时,重复添加回调函数 graphicsBase::Base().AddCallback_CreateSwapchain(CreateFramebuffers); graphicsBase::Base().AddCallback_DestroySwapchain(DestroyFramebuffers); return rpwf;
因为这次的深度模板附件的大小与交换链图像一致,所以其创建和销毁当然也放在相应lambda中。
创建与交换链图像相应个数的深度模板附件:
auto CreateFramebuffers = [] { dsas_screenWithDS.resize(graphicsBase::Base().SwapchainImageCount()); rpwf.framebuffers.resize(graphicsBase::Base().SwapchainImageCount()); for (auto& i : dsas_screenWithDS) i.Create(_depthStencilFormat, windowSize, 1, VK_SAMPLE_COUNT_1_BIT, VK_IMAGE_USAGE_TRANSIENT_ATTACHMENT_BIT); /*待后续填充*/; };
-
既然在本次的应用场景中,渲染通道之外用不着深度模板附件,那么在图像用途中指定VK_IMAGE_USAGE_TRANSIENT_ATTACHMENT_BIT,使其可被惰性分配以优化内存开销。
毫无难度地创建帧缓冲:
auto CreateFramebuffers = [] { dsas_screenWithDS.resize(graphicsBase::Base().SwapchainImageCount()); rpwf.framebuffers.resize(graphicsBase::Base().SwapchainImageCount()); for (auto& i : dsas_screenWithDS) i.Create(_depthStencilFormat, windowSize, 1, VK_SAMPLE_COUNT_1_BIT, VK_IMAGE_USAGE_TRANSIENT_ATTACHMENT_BIT); VkFramebufferCreateInfo framebufferCreateInfo = { .renderPass = rpwf.renderPass, .attachmentCount = 2, .width = windowSize.width, .height = windowSize.height, .layers = 1 }; for (size_t i = 0; i < graphicsBase::Base().SwapchainImageCount(); i++) { VkImageView attachments[2] = { graphicsBase::Base().SwapchainImageView(i), dsas_screenWithDS[i].ImageView() }; framebufferCreateInfo.pAttachments = attachments; rpwf.framebuffers[i].Create(framebufferCreateInfo); } };
顶点和索引数据
在main.cpp中定义顶点数据的结构体:
struct vertex { glm::vec3 position; glm::vec4 color; };
立方体一共8个顶点,但我想要它每个面都是纯色,所以每个面以4个颜色相同的顶点来表达,一共要写24个顶点:
vertex vertices[] = { //x+ { { 1, 1, -1 }, { 1, 0, 0, 1 } }, { { 1, -1, -1 }, { 1, 0, 0, 1 } }, { { 1, 1, 1 }, { 1, 0, 0, 1 } }, { { 1, -1, 1 }, { 1, 0, 0, 1 } }, //x- { { -1, 1, 1 }, { 0, 1, 1, 1 } }, { { -1, -1, 1 }, { 0, 1, 1, 1 } }, { { -1, 1, -1 }, { 0, 1, 1, 1 } }, { { -1, -1, -1 }, { 0, 1, 1, 1 } }, //y+ { { 1, 1, -1 }, { 0, 1, 0, 1 } }, { { 1, 1, 1 }, { 0, 1, 0, 1 } }, { { -1, 1, -1 }, { 0, 1, 0, 1 } }, { { -1, 1, 1 }, { 0, 1, 0, 1 } }, //y- { { 1, -1, -1 }, { 1, 0, 1, 1 } }, { { -1, -1, -1 }, { 1, 0, 1, 1 } }, { { 1, -1, 1 }, { 1, 0, 1, 1 } }, { { -1, -1, 1 }, { 1, 0, 1, 1 } }, //z+ { { 1, 1, 1 }, { 0, 0, 1, 1 } }, { { 1, -1, 1 }, { 0, 0, 1, 1 } }, { { -1, 1, 1 }, { 0, 0, 1, 1 } }, { { -1, -1, 1 }, { 0, 0, 1, 1 } }, //z- { { -1, 1, -1 }, { 1, 1, 0, 1 } }, { { -1, -1, -1 }, { 1, 1, 0, 1 } }, { { 1, 1, -1 }, { 1, 1, 0, 1 } }, { { 1, -1, -1 }, { 1, 1, 0, 1 } } }; vertexBuffer vertexBuffer_perVertex(sizeof vertices); vertexBuffer_perVertex.TransferData(vertices);
上述顶点数据是围绕坐标原点的一个长宽高都为2的立方体。
因为这次不使用观察矩阵,观察位置便处于世界坐标系的原点,如果不给上述顶点数据加任何位置偏移,观察位置就会是在立方体内部。
创建逐实例输入的顶点缓冲区,指定多个立方体的位置:
glm::vec3 offsets[] = { { -4, -4, 6 }, { 4, -4, 6 }, { -4, 4, 10 }, { 4, 4, 10 }, { -4, -4, 14 }, { 4, -4, 14 }, { -4, 4, 18 }, { 4, 4, 18 }, { -4, -4, 22 }, { 4, -4, 22 }, { -4, 4, 26 }, { 4, 4, 26 } }; vertexBuffer vertexBuffer_perInstance(sizeof offsets); vertexBuffer_perInstance.TransferData(offsets);
-
还是因为不使用观察矩阵,观察方向默认为+z方向,位置坐标的z分量为正值使立方体在观察范围内。
这次将会使用VK_PRIMITIVE_TOPOLOGY_TRIANGLE_LIST为图元拓扑类型绘制立方体,那么便需要36个索引:
uint16_t indices[36] = { 0, 1, 2, 2, 1, 3 }; for (size_t i = 1; i < 6; i++) for (size_t j = 0; j < 6; j++) indices[i * 6 + j] = indices[j] + i * 4; indexBuffer indexBuffer(sizeof indices); indexBuffer.TransferData(indices);
-
这里
{ 0, 1, 2, 2, 1, 3 }的顶点顺序有讲究,详见之后创建管线时有关背面剔除的说明。
书写着色器并创建管线
Into3D.vert.shader
#version 460 #pragma shader_stage(vertex) layout(location = 0) in vec3 i_Position; //逐顶点 layout(location = 1) in vec4 i_Color; //逐顶点 layout(location = 2) in vec3 i_InstancePosition; //逐实例 layout(location = 0) out vec4 o_Color; layout(push_constant) uniform pushConstants { mat4 proj; //投影矩阵 }; void main() { gl_Position = proj * vec4(i_Position + i_InstancePosition, 1); o_Color = i_Color; }
-
通过将矢量右乘到投影矩阵,将相机坐标系(这次没相机所以等价于世界坐标系了)下的坐标转换到齐次剪裁空间坐标。
Into3D.frag.shader
#version 460 #pragma shader_stage(fragment) layout(location = 0) in vec4 i_Color; layout(location = 0) out vec4 o_Color; void main() { o_Color = i_Color; }
创建管线
定义相关对象,创建管线布局:
pipelineLayout pipelineLayout_into3d; pipeline pipeline_into3d; const auto& RenderPassAndFramebuffers_Screen() { static const auto& rpwf = easyVulkan::CreateRpwf_ScreenWithDS(); return rpwf; } void CreateLayout() { VkPushConstantRange pushConstantRange = { VK_SHADER_STAGE_VERTEX_BIT, 0, 64 }; VkPipelineLayoutCreateInfo pipelineLayoutCreateInfo{ .pushConstantRangeCount = 1, .pPushConstantRanges = &pushConstantRange }; pipelineLayout_into3d.Create(pipelineLayoutCreateInfo); }
创建管线:
void CreateLayout() { static shaderModule vert("shader/Into3d.vert.spv"); static shaderModule frag("shader/Into3d.frag.spv"); VkPipelineShaderStageCreateInfo shaderStageCreateInfos[2] = { vert.StageCreateInfo(VK_SHADER_STAGE_VERTEX_BIT), frag.StageCreateInfo(VK_SHADER_STAGE_FRAGMENT_BIT) }; auto Create = [] { graphicsPipelineCreateInfoPack pipelineCiPack; pipelineCiPack.createInfo.layout = pipelineLayout_into3d; pipelineCiPack.createInfo.renderPass = RenderPassAndFramebuffers().renderPass; pipelineCiPack.vertexInputBindings.emplace_back(0, sizeof(vertex), VK_VERTEX_INPUT_RATE_VERTEX); pipelineCiPack.vertexInputBindings.emplace_back(1, sizeof(glm::vec3), VK_VERTEX_INPUT_RATE_INSTANCE); pipelineCiPack.vertexInputAttributes.emplace_back(0, 0, VK_FORMAT_R32G32B32_SFLOAT, offsetof(vertex, position)); pipelineCiPack.vertexInputAttributes.emplace_back(1, 0, VK_FORMAT_R32G32B32A32_SFLOAT, offsetof(vertex, color)); pipelineCiPack.vertexInputAttributes.emplace_back(2, 1, VK_FORMAT_R32G32B32_SFLOAT, 0); pipelineCiPack.inputAssemblyStateCi.topology = VK_PRIMITIVE_TOPOLOGY_TRIANGLE_LIST; pipelineCiPack.viewports.emplace_back(0.f, 0.f, float(windowSize.width), float(windowSize.height), 0.f, 1.f); pipelineCiPack.scissors.emplace_back(VkOffset2D{}, windowSize); //开启背面剔除 pipelineCiPack.rasterizationStateCi.cullMode = VK_CULL_MODE_BACK_BIT; pipelineCiPack.rasterizationStateCi.frontFace = VK_FRONT_FACE_COUNTER_CLOCKWISE; //默认值,为0 pipelineCiPack.multisampleStateCi.rasterizationSamples = VK_SAMPLE_COUNT_1_BIT; //开启深度测试 pipelineCiPack.depthStencilStateCi.depthTestEnable = VK_TRUE; pipelineCiPack.depthStencilStateCi.depthWriteEnable = VK_TRUE; pipelineCiPack.depthStencilStateCi.depthCompareOp = VK_COMPARE_OP_LESS; //若新片元的深度更小,则通过测试 pipelineCiPack.colorBlendAttachmentStates.push_back({ .colorWriteMask = 0b1111 }); pipelineCiPack.UpdateAllArrays(); pipelineCiPack.createInfo.stageCount = 2; pipelineCiPack.createInfo.pStages = shaderStageCreateInfos_into3d; pipeline_Into3d.Create(pipelineCiPack); }; auto Destroy = [] { pipeline_into3d.~pipeline(); }; graphicsBase::Base().AddCallback_CreateSwapchain(Create); graphicsBase::Base().AddCallback_DestroySwapchain(Destroy); Create(); }
-
如果你没有在片段着色器中书写涉及判定gl_FrontFacing的逻辑的话,VK_CULL_MODE_BACK_BIT和VK_FRONT_FACE_COUNTER_CLOCKWISE的组合,跟VK_CULL_MODE_FRONT_BIT和VK_FRONT_FACE_CLOCKWISE的组合效果是一样的。
-
depthWriteEnable为VK_TRUE使得深度测试通过后写入深度,这个写入指将当前深度值用作与后续片段的深度进行比较的新基准值,不影响渲染通道结束时对深度附件的读写。
-
因为我前面使用的是左手系的模型数据(虽然对正方体来说没太大区别)和位移,且打算使用对应左手系的投影矩阵,那么深度值更小意味着离观察者更近,故使用VK_COMPARE_OP_LESS。
3D渲染中,对于有内外之分的封闭物体(且一般不透明),在栅格化阶段直接剔除其看不见的面以节省运算性能,这叫面剔除。
这里将cullMode指定为VK_CULL_MODE_BACK_BIT以开启背面剔除,然后所谓正背面是由顶点顺序决定的,VK_FRONT_FACE_COUNTER_CLOCKWISE意味着,如果一个三角形中三个顶点的坐标,依被着色器读取的顺序呈现逆时针,那么就是正面。
这里所谓的坐标为输出到gl_Position的坐标,或NDC坐标(两者必然同顺或同逆:x和y都除以负的w时,相当于双重镜像,或说旋转180°)。
解释先前{ 0, 1, 2, 2, 1, 3 }的顶点顺序:
对于我给出的立方体顶点数据中任意面的四个顶点中,0和3号顶点、1和2号顶点各构成对角线,即0和3在1和2构成的线不同侧。那么若{ 0, 1, 2 }的三角形为逆时针,则{ 1, 2, 3 }的三角形必然为顺时针。因此这里第二个三角形的顶点顺序得是{ 2, 1, 3 }。
绘制
调用glm::infinitePerspectiveLH_ZO(...)来生成对应左手系、NDC深度为[0, 1]的无限远远平面透视投影矩阵,可用glm::radians(...)将角度制值转到弧度制。
并使用先前在Ch4-1中所写的函数,应对GLSL和Vulkan的+y方向差异问题:
glm::mat4 proj = FlipVertical(glm::infinitePerspectiveLH_ZO(glm::radians(60.f), float(windowSize.width) / windowSize.height, 0.1f));
该录制哪些命令应该已完全无需说明,整个主函数如下:
int main() { if (!InitializeWindow({ 1280, 720 })) return -1; const auto& [renderPass, framebuffers] = RenderPassAndFramebuffers(); CreateLayout(); CreatePipeline(); fence fence; semaphore semaphore_imageIsAvailable; semaphore semaphore_renderingIsOver; commandBuffer commandBuffer; commandPool commandPool(graphicsBase::Base().QueueFamilyIndex_Graphics(), VK_COMMAND_POOL_CREATE_RESET_COMMAND_BUFFER_BIT); commandPool.AllocateBuffers(commandBuffer); vertex vertices[] = { /*...*/ }; vertexBuffer vertexBuffer_perVertex(sizeof vertices); vertexBuffer_perVertex.TransferData(vertices); glm::vec3 offsets[] = { /*...*/ }; vertexBuffer vertexBuffer_perInstance(sizeof offsets); vertexBuffer_perInstance.TransferData(offsets); uint16_t indices[36] = { 0, 1, 2, 2, 1, 3 }; for (size_t i = 1; i < 6; i++) for (size_t j = 0; j < 6; j++) indices[i * 6 + j] = indices[j] + i * 4; indexBuffer indexBuffer(sizeof indices); indexBuffer.TransferData(indices); glm::mat4 proj = FlipVertical(glm::infinitePerspectiveLH_ZO(glm::radians(60.f), float(windowSize.width) / windowSize.height, 0.1f)); VkClearValue clearValues[2] = { { .color = { 0.f, 0.f, 0.f, 1.f } }, { .depthStencil = { 1.f, 0 } } }; while (!glfwWindowShouldClose(pWindow)) { while (glfwGetWindowAttrib(pWindow, GLFW_ICONIFIED)) glfwWaitEvents(); graphicsBase::Base().SwapImage(semaphore_imageIsAvailable); auto i = graphicsBase::Base().CurrentImageIndex(); commandBuffer.Begin(VK_COMMAND_BUFFER_USAGE_ONE_TIME_SUBMIT_BIT); renderPass.CmdBegin(commandBuffer, framebuffers[i], { {}, windowSize }, clearValues); vkCmdBindPipeline(commandBuffer, VK_PIPELINE_BIND_POINT_GRAPHICS, pipeline_into3d); VkBuffer buffers[2] = { vertexBuffer_perVertex, vertexBuffer_perInstance }; VkDeviceSize offsets[2] = {}; vkCmdBindVertexBuffers(commandBuffer, 0, 2, buffers, offsets); vkCmdBindIndexBuffer(commandBuffer, indexBuffer, 0, VK_INDEX_TYPE_UINT16); vkCmdPushConstants(commandBuffer, pipelineLayout_into3d, VK_SHADER_STAGE_VERTEX_BIT, 0, 64, &proj); vkCmdDrawIndexed(commandBuffer, 36, 12, 0, 0, 0); renderPass.CmdEnd(); commandBuffer.End(); graphicsBase::Base().SubmitCommandBuffer_Graphics(commandBuffer, semaphore_imageIsAvailable, semaphore_renderingIsOver, fence, VK_PIPELINE_STAGE_EARLY_FRAGMENT_TESTS_BIT); graphicsBase::Base().PresentImage(semaphore_renderingIsOver); glfwPollEvents(); TitleFps(); fence.WaitAndReset(); } TerminateWindow(); return 0; }
-
前面创建渲染通道时,子通道依赖的dstStageMask是VK_PIPELINE_STAGE_EARLY_FRAGMENT_TESTS_BIT,为获取到交换链图像后再发生布局转换,semaphore_imageIsAvailable对应的等待阶段不得晚于该阶段。
运行程序,效果如下:
若反转视口的最大最小深度,即这么指定:
pipelineCiPack.viewports.emplace_back(0.f, 0.f, float(windowSize.width), float(windowSize.height), 1.f, 0.f);
则效果为:
-
因背面剔除,绘制出来的面跟前面是一样的。
-
深度变为
1-原先的值,因而变成了近的物体被远的物体遮挡。
将深度显示到屏幕
将深度呈现到屏幕的最省事的办法是什么?
当然是修改片段着色器啦!
Into3d_visualizeDepth.frag.shader:
#version 460 #pragma shader_stage(fragment) layout(location = 0) in vec4 i_Color; layout(location = 1) out vec4 o_Color; void main() { o_Color = vec4(gl_FragCoord.z.xxx, 1); }
-
gl_FragCoord是片段着色器的内置输入。
-
标量.xxx这个写法等价于vec3(标量)。
不过这样渲染出来的灰度图还不是深度附件该有的样子,清屏颜色得跟清屏的深度值统一(嘛,其实心里知道背景深度是1就行了):
VkClearValue clearColors[2] = {
{ .color = { 1.f, 1.f, 1.f, 1.f } },
{ .depthStencil = { 1.f, 0 } }
};
于是话不多说,除了着色器路径,其余一字不改,跑出来的结果是:

竟然!难道是我程序写错了吗!?不能慌,赶紧看看先前齐次剪裁空间下的深度公式:Z_hcs = z - dn;
该式除以z,即是使用无限远远平面透视投影矩阵时的NDC深度:Z_p = 1 - dn / z;
近平面位置dn是0.1f,那只有在z很小的时候,Z_p才有可能是一个明显小于1的数值。
(这也说明了,透视投影具有近处的深度精度较高的特点)
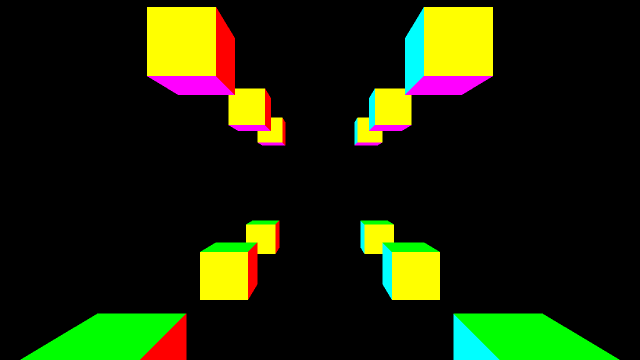
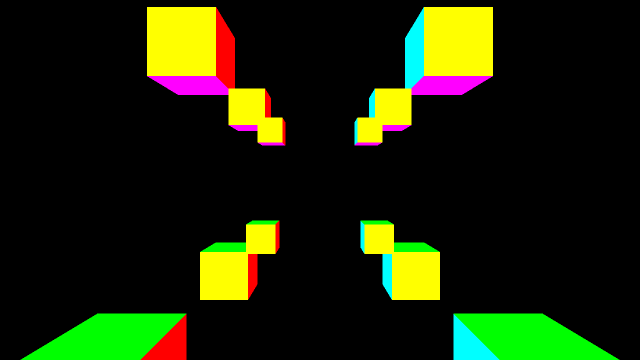
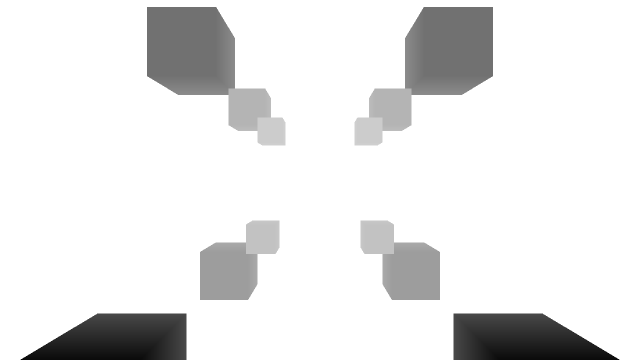
那还不简单,让近平面远一点好了,设定近平面位置为5.f,效果便显著多了:
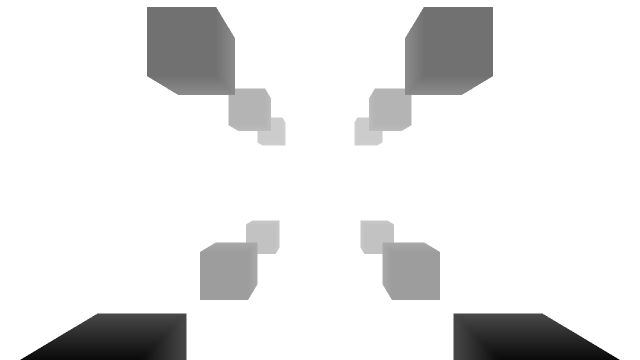
关闭深度写入(深度模板状态创建信息中的depthWriteEnable为VK_FALSE)的话会变成这样,原因是因为所有片段都在跟背景的1.f比较深度:
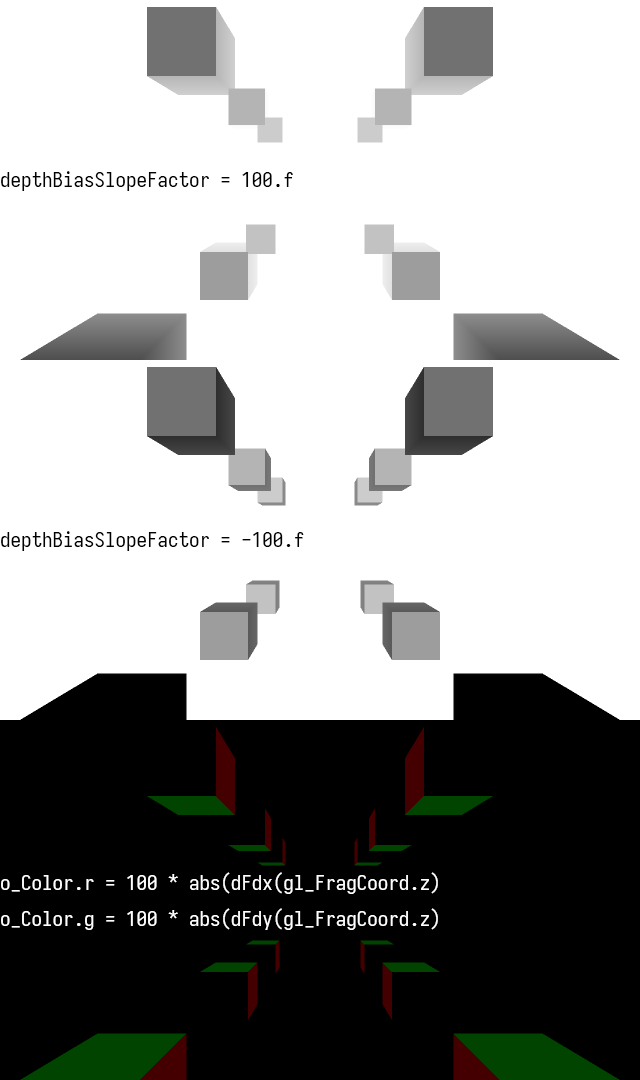
开启深度偏移(栅格化状态创建信息中的depthBiasEnable为VK_TRUE)后,将深度偏移坡度系数分别指定为100和-100的效果如下。
最下方一格的红绿两通道的数值,分别是x和y两个方向上视口深度的偏导数绝对值乘以100。
其实笔者原想在这里采样深度贴图到屏幕(但是这么一来代码量就得跟前一节几乎一样多),或者使用输入附件(这是下一节的内容),因不想这一节冗余的代码太多,索性作罢。
注1:只渲染深度,然后把深度图像blit到交换链图像是不行的,验证层会报错(深度模板格式的图像只能被blit到相同格式的图像)。
注2:若要采样深度贴图,再次提醒,写入描述符的image view的aspectMask应只注明深度,不要注明模板(有人为此debug半天却找不出原因所在)。
深度边界测试
在此简单演示下深度边界测试的使用,深度边界测试的解释见深度模板状态创建信息。
取决于具体型号,英特尔核显可能不支持深度边界测试。
深度边界测试根据已在深度缓冲中的深度值,决定是否要执行后续管线功能。
这里的“已在深度缓冲中的深度值”指的是渲染过程中,在执行某次绘制命令前,已经记录下的深度值。
这里用一个非常简单的流程来演示深度边界测试:
1.使用没有片段着色器的管线进行绘制,留下深度值
2.使用开启了深度边界测试的管线,进行片段着色
这两步会在同一个渲染通道的同一个子通道中完成。
创建管线
基于先前的程序进行修改,创建只留下深度的管线pipeline_depthOnly:
pipeline pipeline_depthOnly; void CreateLayout() { /*...前面略*/ auto Create = [] { /*...略去与先前创建pipeline_into3d时完全相同的代码*/ pipelineCiPack.createInfo.stageCount = 1; //着色器阶段数量变为1,只剩顶点着色器 pipelineCiPack.createInfo.pStages = shaderStageCreateInfos_into3d; pipeline_depthOnly.Create(pipelineCiPack); }; /*...后面略*/ }
然后创建pipeline_into3d,开启深度边界测试,并修改深度比较方式变为相等:
void CreateLayout() { /*...*/ auto Create = [] { /*...*/ pipelineCiPack.createInfo.stageCount = 1; pipelineCiPack.createInfo.pStages = shaderStageCreateInfos_into3d; pipeline_depthOnly.Create(pipelineCiPack); pipelineCiPack.depthStencilStateCi.depthCompareOp = VK_COMPARE_OP_EQUAL; //深度比较方式变为相等 pipelineCiPack.depthStencilStateCi.depthBoundsTestEnable = VK_TRUE; pipelineCiPack.depthStencilStateCi.minDepthBounds = 0.4f; pipelineCiPack.depthStencilStateCi.maxDepthBounds = 0.7f; pipelineCiPack.createInfo.stageCount = 2; pipeline_into3d.Create(pipelineCiPack); }; /*...*/ }
-
深度范围[0.4, 0.7]可以使得近平面位置为5.f时,画面中正好只留下四个立方体,这个深度范围是对先前的深度图取色测得的。
绘制
近平面位置设置在5.f:
glm::mat4 proj = FlipVertical(glm::infinitePerspectiveLH_ZO(glm::radians(60.f), float(windowSize.width) / windowSize.height, 5.f));
先后绑定管线然后绘制:
renderPass.CmdBegin(commandBuffer, framebuffers[i], { {}, windowSize }, clearColors); //先绑定pipeline_depthOnly留下深度 vkCmdBindPipeline(commandBuffer, VK_PIPELINE_BIND_POINT_GRAPHICS, pipeline_depthOnly); VkBuffer buffers[2] = { vertexBuffer_perVertex, vertexBuffer_perInstance }; VkDeviceSize offsets[2] = {}; vkCmdBindVertexBuffers(commandBuffer, 0, 2, buffers, offsets); vkCmdBindIndexBuffer(commandBuffer, indexBuffer, 0, VK_INDEX_TYPE_UINT16); vkCmdPushConstants(commandBuffer, pipelineLayout_into3d, VK_SHADER_STAGE_VERTEX_BIT, 0, 64, &proj); vkCmdDrawIndexed(commandBuffer, 36, 12, 0, 0, 0); //再绑定pipeline_into3d进行片段着色 vkCmdBindPipeline(commandBuffer, VK_PIPELINE_BIND_POINT_GRAPHICS, pipeline_into3d); vkCmdDrawIndexed(commandBuffer, 36, 12, 0, 0, 0); renderPass.CmdEnd();
运行程序,效果如下: